
Contexte
Stage de 3 mois au sein du Fab Lab de Naval Group à Lorient. Travail en autonomie dans un environnement de prototypage rapide dédié à l'innovation.
Mission
Concevoir un prototype de drone aérien "in-box" : un boîtier embarqué capable de compenser les mouvements d'un navire pour permettre à un drone aérien d'atterrir ou d'amerrir de manière stable.
Ce que j'ai développé
- •Conception complète du boîtier sur SolidWorks (modélisation 3D, mise en plan, cotation)
- •Système de compensation de mouvement à base de rotule pour absorber le roulis et le tangage
- •Mécanisme de vis sans fin permettant de déployer la plateforme d'atterrissage hors du boîtier
- •Fabrication de l'ensemble du prototype en impression 3D avec itérations successives
- •Pilotage de la vis sans fin avec un moteur pas à pas et une carte Arduino
- •Assemblage et tests fonctionnels du mécanisme de compensation
Aperçu
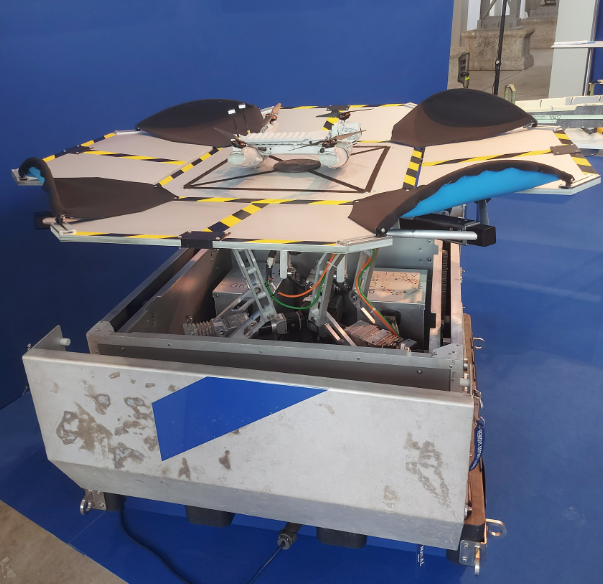
Drone in-box (illustration, pas ma réalisation) · Source : mars-attaque.blogspot.com
Outils & Technologies
Outils & Technologies
- SolidWorks
- Mise en plan
- Cotation
Prototypage
- Impression 3D
- Assemblage mécanique
- Itérations rapides
Mécanique & Électronique
- Système de rotule
- Vis sans fin
- Moteur pas à pas
- Arduino
Résultat
Prototype fonctionnel démontrant la faisabilité du concept de drone in-box avec compensation de mouvement. Le mécanisme de rotule + vis sans fin a permis de valider le déploiement stable de la plateforme d'atterrissage malgré les mouvements simulés du navire.